Autonomous Vehicles for Control and Assessment of Lightweight Structures
The recent shift towards lightweight materials for use in the construction of civil engineering structures is driven by considerable benefits such as cost savings, ease of erection, and rapid deployment. However, the reduced self-weight often increases the dynamic sensitivity of the structure and in many cases, auxiliary damping devices are required. Current control strategies lack the required adaptability to effectively control lightweight structures and the required design time associated with existing devices inhibits rapid construction of temporary lightweight structures. The primary goal of this work is to develop deployable, autonomous vibration control systems, which are capable of controlling a range of structures and are suitable for rapid, temporary deployment. These systems are being developed such that they are able to sense the dominant mode(s) of vibration and respond to changes in the structural response effectively.
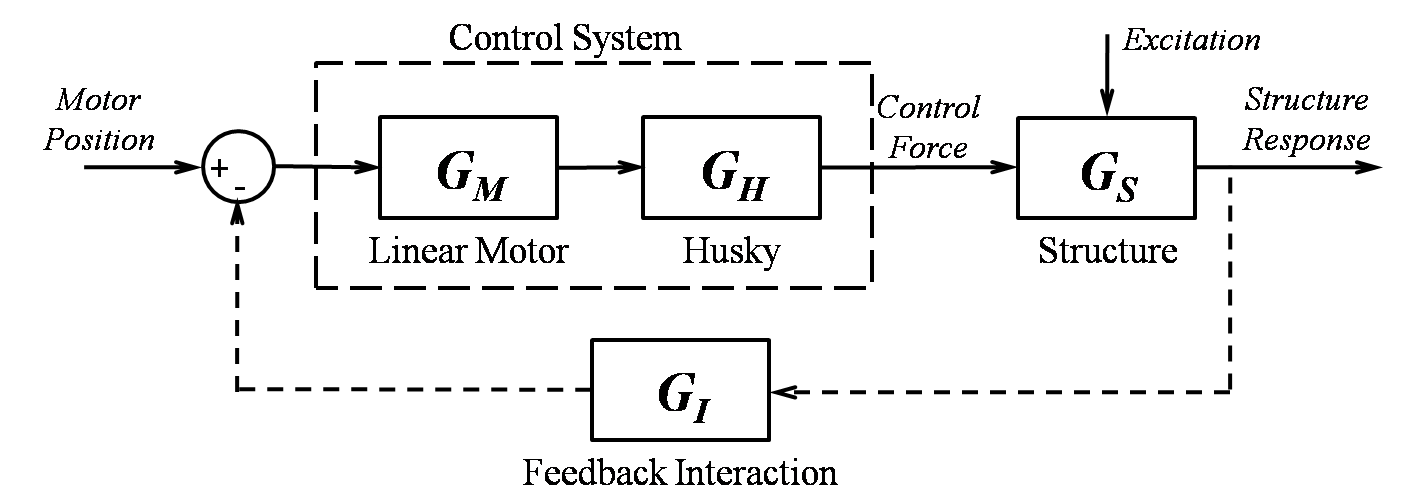
One of the designs we are currently working on is an active control system consisting of a linear motor mounted on an unmanned ground vehicle. The system, shown in Figure 1, is controlled using an on-board National Instruments cRIO and provides extensive customizeability using the ROS environment. Studies related to control-structure interaction (see Figure 2), real-time hybrid simulation, sensor deployment and path planning are currently being undertaken.

Current work involves developing adaptive robust control algorithms that inherently account for system constraints to autonomously control bridge vibrations
Publications
- Goorts, K. and Narasimhan, S. (2018).
Adopting robotic systems to enhance vibration control of footbridges.
Structural Engineering International, doi: DOI: 10.1080/10168664.2018.1495042. vol. 24, no. 4, pp. 435-447.
- Goorts, K. and Narasimhan, S. (2018).
Model predictive control for deployable, autonomous control systems.
In Proceedings of: 7th World Conference on Structural Control and Monitoring (WCSCM), Qingdao, China, July 22 - 25.
- Ashasi-Sorkhabi, A., Goorts, K. Mercan, O., and Narasimhan, S. (2018).
Mitigating pedestrian bridge motions using a deployable autonomous control system.
Journal of Bridge Engineering., doi: DOI: 10.1061/1943-5592.0001304. vol. 24, no. 1.
- Goorts, K., Phillips, S., Ashasi-Sorkhabi, A., and Narasimhan, S. (2017).
Structural control using a deployable autonomous control system.
International Journal of Intelligent Robotics and Applications. 1(3), 306-326.
- Goorts, K., Ashasi-Sorkhabi, A., and Narasimhan, S. (2017).
Deployable active mass dampers for vibration mitigation in lightweight bridges.
Journal of Structural Engineering. 143(12), 04017159.
- Liu, Y., Goorts, K., Ashasi-Sorkhabi, A., Mercan, O., and Narasimhan, S. (2016).
A state space-based explicit integration method for real-time hybrid simulation.
Structural Control and Health Monitoring, 23(4), 641-658.
- Goorts, K., and Narasimhan, S. (2018).
The role of control-structure interaction in deployable autonomous control systems.
In Proceedings of: IMAC 36, The International Modal Analysis Conference, Orlando, FL. United States. Feb. 12-15.
- Goorts, K., and Narasimhan, S. (2017).
Towards deployable, autonomous, vibration control systems for lightweight footbridges.
In Proceedings of: Footbridge Berlin 2017, Berlin, Germany. Sept. 6-8.
- Goorts, K., and Narasimhan, S. (2017).
Modeling and controller design for deployable autonomous control systems.
In Proceedings of: The 13th International Workshop on Advanced Smart Materials and Smart Structures Technology. Tokyo, Japan. July 22-23.
Students



